Back
Insights
Jan 27, 2025
The Challenges of Application Configurations in Robotics
Vedant Nair

Introduction
A surprisingly common complaint I hear from robotics companies is their struggle to manage, version, and update application configurations (configs).
At first glance, this seemed counterintuitive. Why should configs be harder here than in other fields? But robotics systems are uniquely complex: a patchwork of hardware, firmware, sensors, software, and ML. Configs are the glue that holds them together.
In robotics, these configs define how a robot’s software interacts with its environment. They sit between code and execution, controlling everything from sensor calibration to safety protocols—all without requiring recompilation.
In this blog, we’ll dive into what these configs are used for and why they’re so challenging for robotics teams to get right.
What Are Application Configs Used For?
Feature Flags:
A/B test new features or gradually roll them out to mitigate risk
Example: Enable a beta gripper control algorithm only for robots in your lab in your YAML
Environment Settings:
Toggle system behavior in different environments from development to production.
Example:
.envfile for switching between simulation and development.
Integration Settings:
Connect to external systems: databases, auth servers, or APIs
Example: A JSON config for uploading sensor data:
Hardware Definitions:
Define how software interacts with motors, LiDAR, GPUs, etc.
Example: YAML for a motor’s safety settings:
The Challenges of Application Configuration in Robotics
As things scale—more robots, team members, and customers—configs can become difficult to manage, version, and update.
Here’s why:
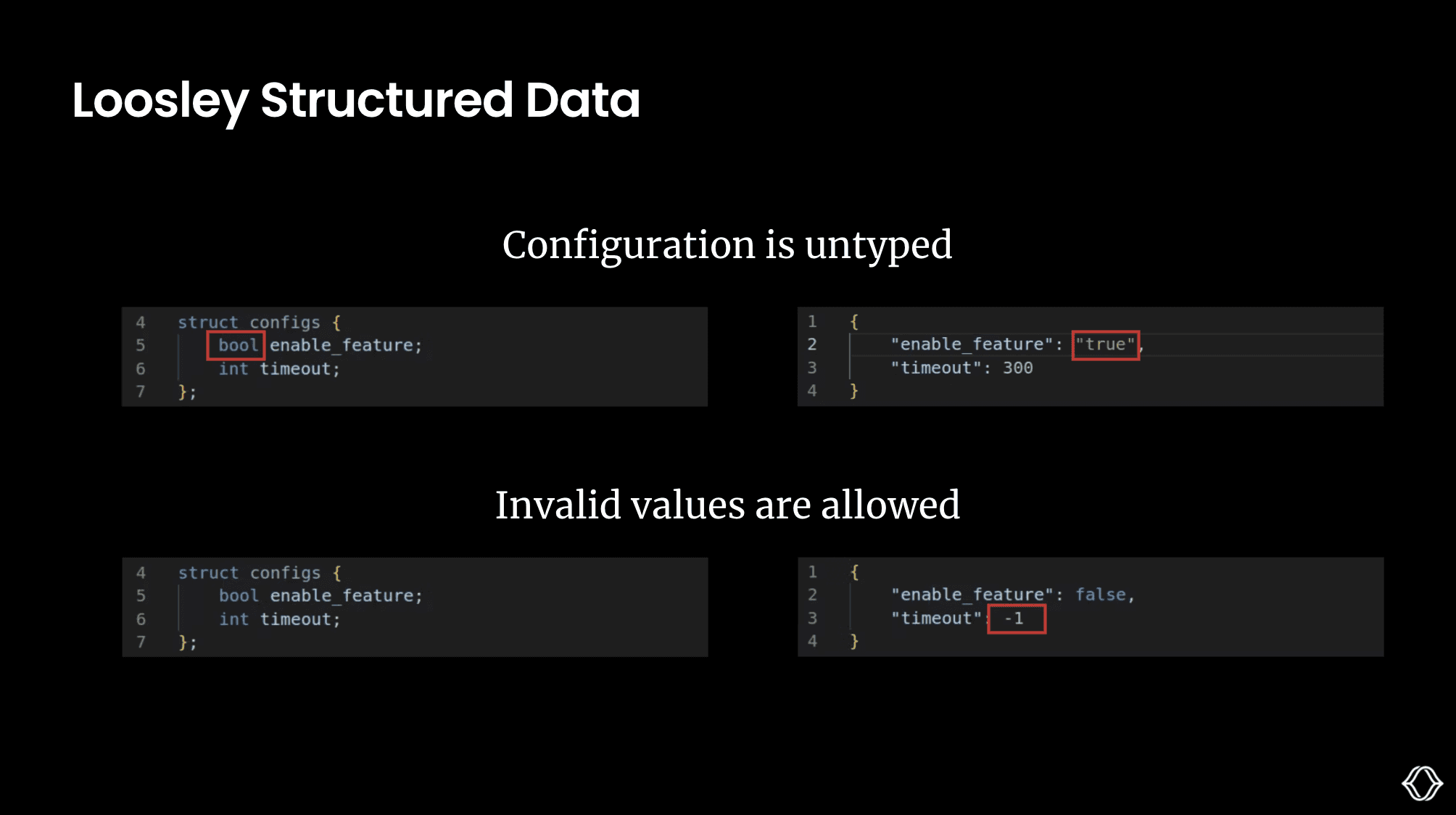
Loosely Structured Data
YAML and JSON are loosely structured—there’s no built-in way to enforce data types or validate values. This flexibility has its liabilities:
A mismatch like lidar_scan_rate: "20" (string) instead of 20 (integer) can crash a strictly typed perception pipeline.
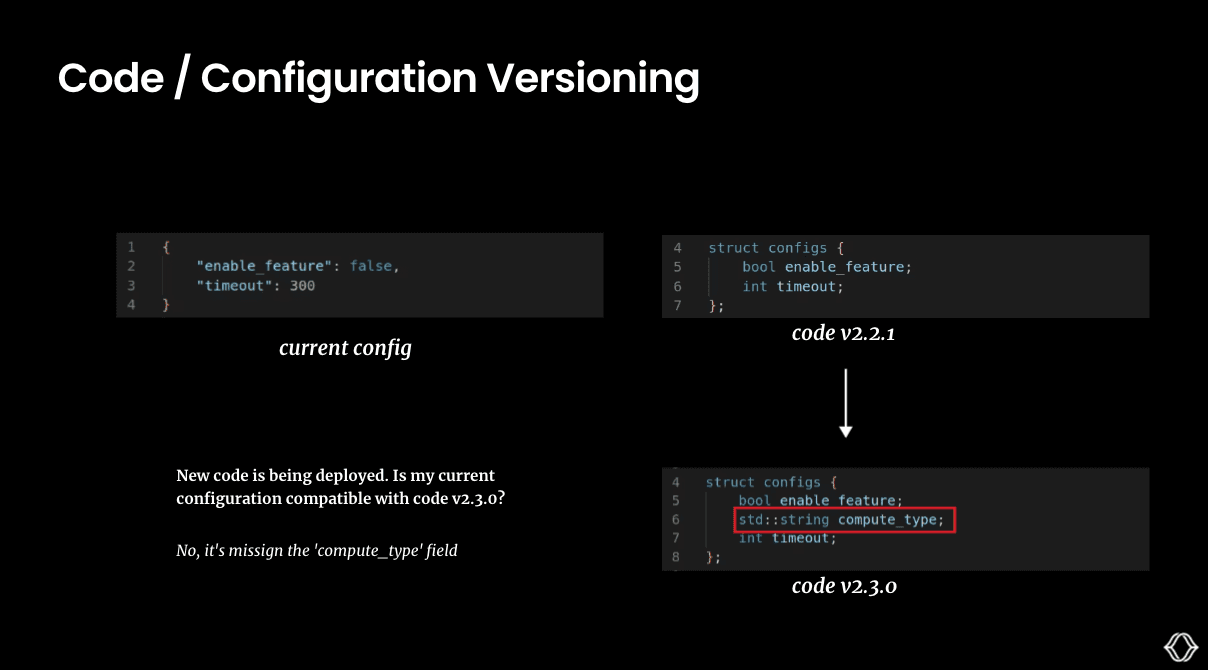
Code/Configuration Versioning
Robotics teams ship software updates frequently—but if the config schema doesn’t evolve in lockstep, things break.
Struct Mismatches: The new code expects a field like
motor_timeout_ms, but old configs omit it → robots ignore safety settings.Zombie Fields: You remove
legacy_api_endpointfrom the code, but leftover configs still reference it. When a subsystem or library tries to parse that field, you end up with cryptic errors or partial failures.Complexities of Scale: Imagine pushing v2.2.1 code to 100 robots only to realize that 30 still have v1.5 configs. Now you have to manually fix them!
P.S. → If you’re a robotics team that needs help deploying over the air (OTA) software updates, check out Miru ;)
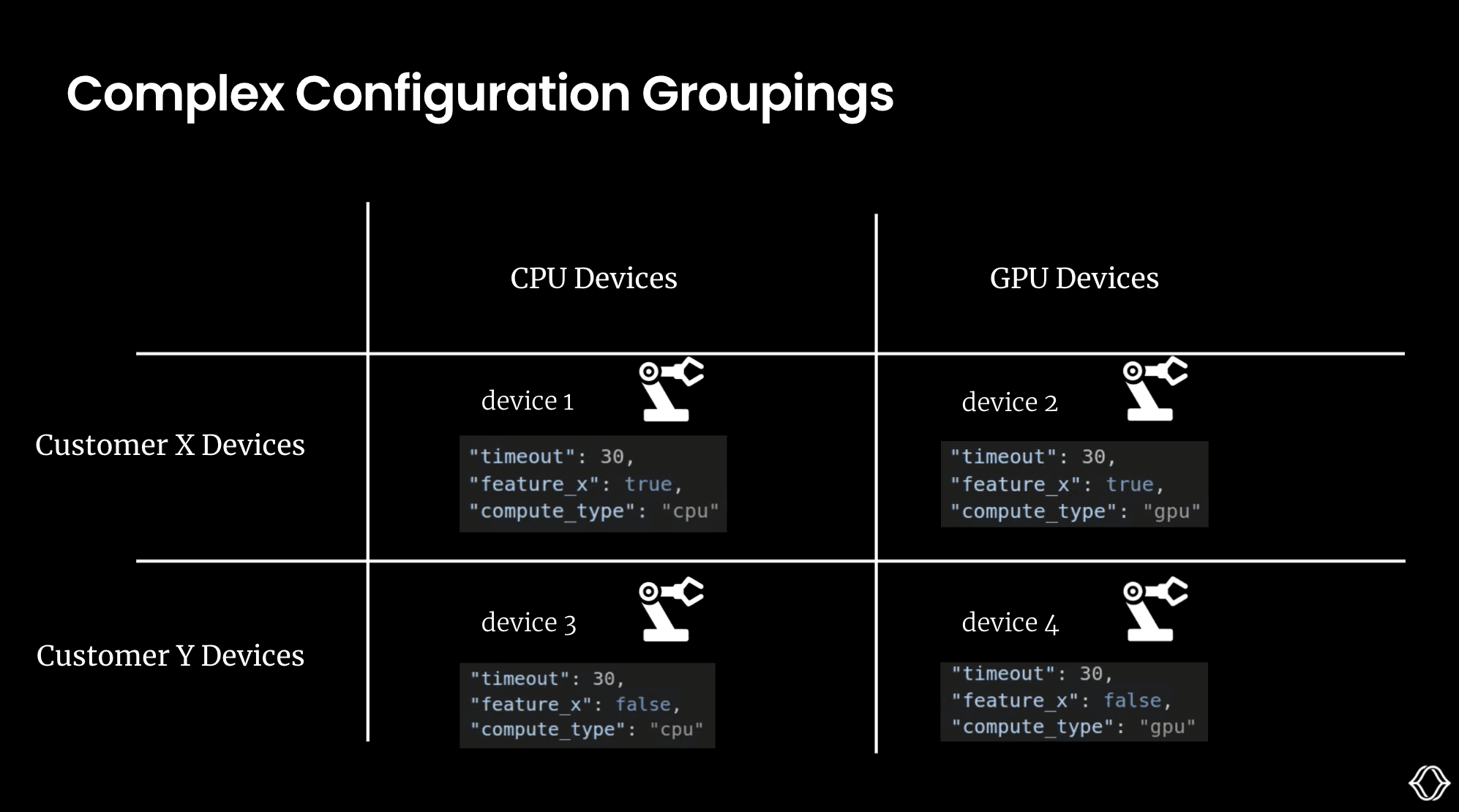
Complex Configuration Groupings:
Robotics configs aren’t flat files—they’re hierarchical, conditional, and combinatorial.
Hierarchical Configurations
Customer X’s robots need a custom edge server IP. Without fleet-level configurations, you’re editing 50 YAMLs by hand.
Conditional Logic:
“Enable
beta_feature_xonly if the robot is in ‘group_beta’ andfirmware > v2.1.” Now, do that for 20 more features! Either find yourself an intern or get ready to be bored for the next 4 hours of your life.
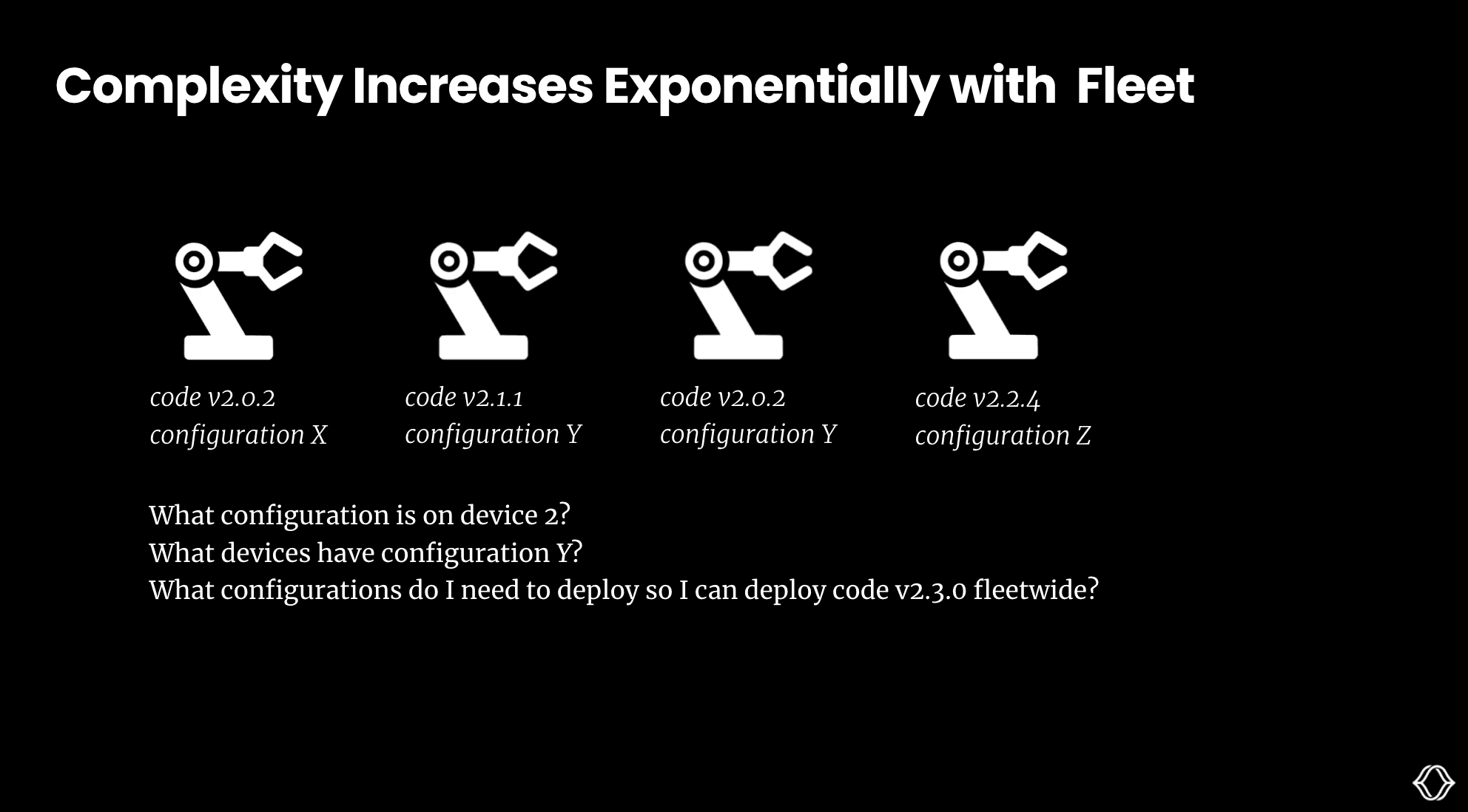
Combinatorial Complexity
As shown below, an individual robot can have many configuration combinations, making managing and versioning challenging.
Complexity Grows Exponentially with Fleet
This pain multiplies as you deploy more robots.
Differing Needs Between Stakeholders
Multiple internal users rely on these configs, each with unique goals and skill levels:
Software Engineers: Use configs in development, deployment, and debugging; highly technical.
Deployment/Field Engineers: On-site installation and troubleshooting; less comfortable with raw data.
Compliance: Must audit configs for regulatory reasons (e.g., speed-limit logging in autonomous vehicles).
Deployment Challenges
Even if you’ve versioned and grouped configs correctly, getting them onto the target device is tricky.
Networking Constraints:
Many robots are subject to poor networking. What happens if the network drops in the middle of an update?
What happens if we are bandwidth-constrained and updates are slow?
Restart & State Maintenance
Some configuration changes require restarting an application. But what happens if the robot is in operation?
How do we know whether to restart the application or do a hot reload?
Rollbacks + Delta Updates
We don’t want an update to download halfway, leaving the robot without some of the necessary parameters. How can we ensure that updates are atomic and roll back when something fails?
In the same vein, most updates will be minor, so how can we be efficient by caching most of the updates and only pulling down the delta?
User-Facing Configurations
Some robotics products come with tablets or control planes that allow the end-user to configure the robot and change its settings, such as speed limits, task priorities, and safety zones.
These user settings must map cleanly to underlying configs. If the UI writes arm_speed=9001 to a JSON file expecting a value from 0.1–1.0, your robot is in trouble.

Conclusion
Configurations are one of the core software components that make robots operate smoothly. But as we’ve discussed, they have present gnarly problems in production:
Invalid Data: Configurations lack strict typing or logic, which can lead to runtime errors due to unexpected values
Config/Code Versioning: Both configurations and code need to be versioned in lockstep to ensure compatibility
Fleet-Wide Complexity: As the fleet becomes more diverse, everything from configuration groupings to customer-specific parameters becomes more complex.
Multiple User Groups: Software Engineers, Field Engineers, Compliance, and even end-users interact with configurations, making creating a centralized management platform difficult.
Efficient Updates: Fast, reliable updates with minimal data transfer and rollback capability are needed.
The kicker? None of this gets easier as you scale. Either pour engineering resources into a homegrown solution or keep doing it manually—risking the day a single YAML typo bricks a robot mid-mission.
At Miru, we’re building tools to eliminate this pain for robotics teams and save them from standing up this infra themselves. If you’re having trouble managing, versioning, and deploying your application configs, let’s talk!